
[CDI] OiEau – Administrateur/rice de données sur l’eau (F/H) – SANDRE
février 15, 2022
Le numérique en élevage, un saut vers de nouveaux systèmes de production
février 15, 2022La robotique molle est une branche de la robotique qui s’appuie sur l’utilisation de structures déformables et de matériaux mous. Ce domaine est un sujet de recherche qui s’est fortement développé ces dernières années grâce à de nouveaux matériaux et à l’impression 3D [1] ; cependant malgré les nombreuses innovations, ces machines peinent à prendre la place de leurs homologues rigides dans l’industrie.
Les particularités des machines agricoles, à la fois robustes pour résister au milieu et délicates pour manipuler le vivant, pourraient bien faire de l’agriculture une des premières industries à adopter à grande échelle ces nouvelles techniques.
Nous allons donc établir ici, à travers quelques exemples, un rapide état des lieux de l’état d’adoption de ces machines en agriculture, nous tenterons de voir ce qu’ils révèlent sur la place de la robotique molle en agriculture. Enfin, en présentant les dernières recherches sur la robotique molle, nous montrerons quelles pourraient être les prochaines innovations à faire leur entrée dans le monde agricole.
Des éléments mous “passifs” sont adoptés depuis des années.
Si on se tient à notre première définition de la robotique molle, on s’aperçoit qu’il existe déjà en agriculture de nombreux exemples de machines que l’on peut considérer comme “molles”. On retrouve par exemple les machines arboricoles à noria.
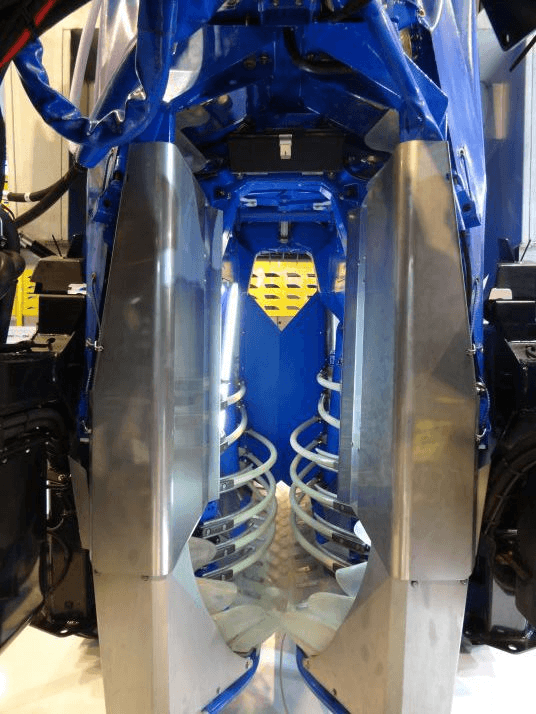
Les godets flexibles (en clair en bas de l’image) défilent à la même vitesse que le véhicule et se déforment pour s’adapter aux différentes formes de pied des plants. Ce système se retrouve depuis plus de 40 ans sur les enjambeurs viticoles et est toujours remis au goût du jour par des constructeurs tel que New Holland [2].
L’autre cas d’école sont les vibreurs arboricoles chez qui l’extrémité, saisissant les arbres, est flexible pour mieux s’adapter aux formes des troncs et répartir la force du préhenseur.
Ces cas montrent que la flexibilité existe déjà dans le machinisme agricole, mais ces machines n’exploitent pas pleinement le potentiel de la robotique molle. Les parties “molles” des machines se contentent d’agir de manière passive, le plus souvent en se déformant pour répartir la force exercée.
Des éléments mous “actifs” font leur entrée sur le marché.
La mécanisation toujours croissante en agriculture pousse aujourd’hui les constructeurs à se tourner vers de nouvelles solutions pour repousser encore la frontière entre ce qui est mécanisable et ce qui ne l’est pas. Une partie de cette avancée peut être permise grâce à des principes plus poussés de la robotique molle comme l’utilisation de parties molles “actives”. Une nouvelle génération de machines adoptant ces principes commence ainsi à voir le jour sur le marché .
Un exemple remarquable de ce tournant est le robot cueilleur de fraises TX robotic strawberry harvester de chez TX robotique [3]. Ce système, couplé à une intelligence artificielle, détecte les fraises mûres, puis le bras robotique se saisit du fruit grâce à une pince flexible. Le pédoncule est sectionné et la fraise est placée dans un panier.

L’extrémité molle de ses machines permet une délicatesse qui ne serait pas permise par un embout rigide “traditionnel”. Mettre en œuvre ces innovations participe à mécaniser des pratiques autrefois jugées trop délicates et jusqu’alors effectuées par la main de l’homme.
La recherche prépare le futur des machines molles en agriculture.
Les résultats de recherche permettent d’avoir un avant goût de la place future des machines molles en agriculture.
Une des faiblesses des robots mous est leur grand nombre de degrés de liberté, ce qui peut rendre difficile les contrôles précis. Cela explique pourquoi les machines présentées plus haut effectuent seulement des mouvements simples ou passifs.
Un des grands enjeux est donc de travailler sur le feedback pour réaliser des actions plus complexes et précises.
Dans le domaine agricole, on peut citer le rapport d’une d’équipe thaïlandaise (A.Kultongkham et al., 2021) qui a travaillé à la conception d’un préhenseur souple à rétroaction de force pour la récolte des tomates [4], fruits particulièrement sensibles.
Un contrôle plus précis de ces machines autorise un plus grand nombre de degrés de liberté. Ces nouveaux robots pourraient ainsi être utilisés dans des environnements encombrés et/ou non structurés. On peut par exemple imaginer une application dans la récolte des pommes dites “à croquer”.
Que retenir?
La robotique molle est une branche prometteuse de la robotique, mais qui peine à trouver sa place dans l’industrie. Le vivant, irrégulier et fragile, pourrait bien faire de l’agriculture une des premières industries utilisatrices de machines molles.
Nous avons vu que certains principes de la robotique molles étaient déjà utilisés en agriculture, mais le plus souvent via des éléments passifs répartissant la force des machines rigides. Une nouvelle génération de machines voit aujourd’hui le jour et intègre des éléments mous “actifs” permettant d’effectuer des travaux délicats autrefois réservés à la main du travailleur.
Finalement, les travaux de recherche ouvrent une fenêtre sur le futur des robots mous en agriculture. Les prochaines avancées seront ainsi tournées vers le feedback et le contrôle, qui font aujourd’hui défaut à ce type de robot. Ces avancées autoriseront plus de degrés de liberté et de précision et pourraient ainsi permettre de faire de la souplesse un principe incontournable en robotique agricole.
Références :
[1] Industrie-techno (03/2018). Robots mous : pourquoi et comment la robotique arrondit ses angles. https://www.industrie-techno.com/article/robots-mous-pourquoi-et-comment-la-robotique-arrondit-ses-angles.52492 (consulté le 5 décembre 2021)
[2] Farm-connexion (06/2020). La Noria a 40 ans. https://www.farm-connexion.com/2020/06/17/viticulture-la-noria-a-40-ans/ (consulté le 10 décembre 2021)
[3] futurefarming.com (10/2021). Kubota and Yamaha invest in robotic strawberry harvester. https://www.futurefarming.com/tech-in-focus/field-robots/kubota-and-yamaha-invest-in-strawberry-harvesting-robots/?utm_source=tripolis&utm_medium=email&utm_term=&utm_content=&utm_campaign=future_farming (consulté le 10 décembre 2021)
[4] A. Kultongkham, S. Kumnon, T. Thintawornkul, T. Chanthasopeephan (03/2021). The design of a force feedback soft gripper for tomato harvesting. Journal of Agricultural Engineering



{kind=link}