
[Alternance] Assistant(e) chef de produit smart agriculture Afrique et Moyen Orient chez Orange
août 17, 2022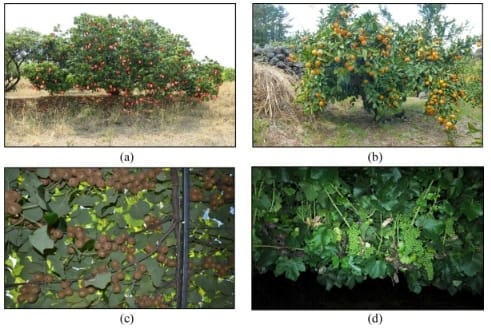
Ou en est-on de la mesure et de l’estimation des rendements en arboriculture et en maraîchage ?
août 23, 2022
Durant l’été 2021, la mobilité d’un robot quadrupède (IIT, HyQReal)
a été testé par des chercheurs de l’université du sacré coeur de Piacenza (Italie), un sein d’un vignoble de la région. Il s’agit certainement de la premiére fois qu’un robot quadripéde (cf. photo mise en avant) est testé en viticulture. Cette mobilité peut constituer une alternative intéressante aux véhicules à roues et à chenilles, en raison de leur potentiel de mobilité plus élevée sur des terrains irréguliers et escarpés. Le résumé étendu (cf. document ci-après) fournit une brève description du robot et des essais de locomotion avec le robot dans des conditions différentes de gestion du sol entre les rangs : sol labouré vs. sol enherbé. Seule la mobilité du robot est testée, pour le moment, aucun outil n’est embarqué sur le robot.
[pdf id=25958]


{kind=link}
{kind=link}