
[Du côté d’ECPA…] Estimer le volume d’un verger avec des caméras Low-Cost
juillet 4, 2023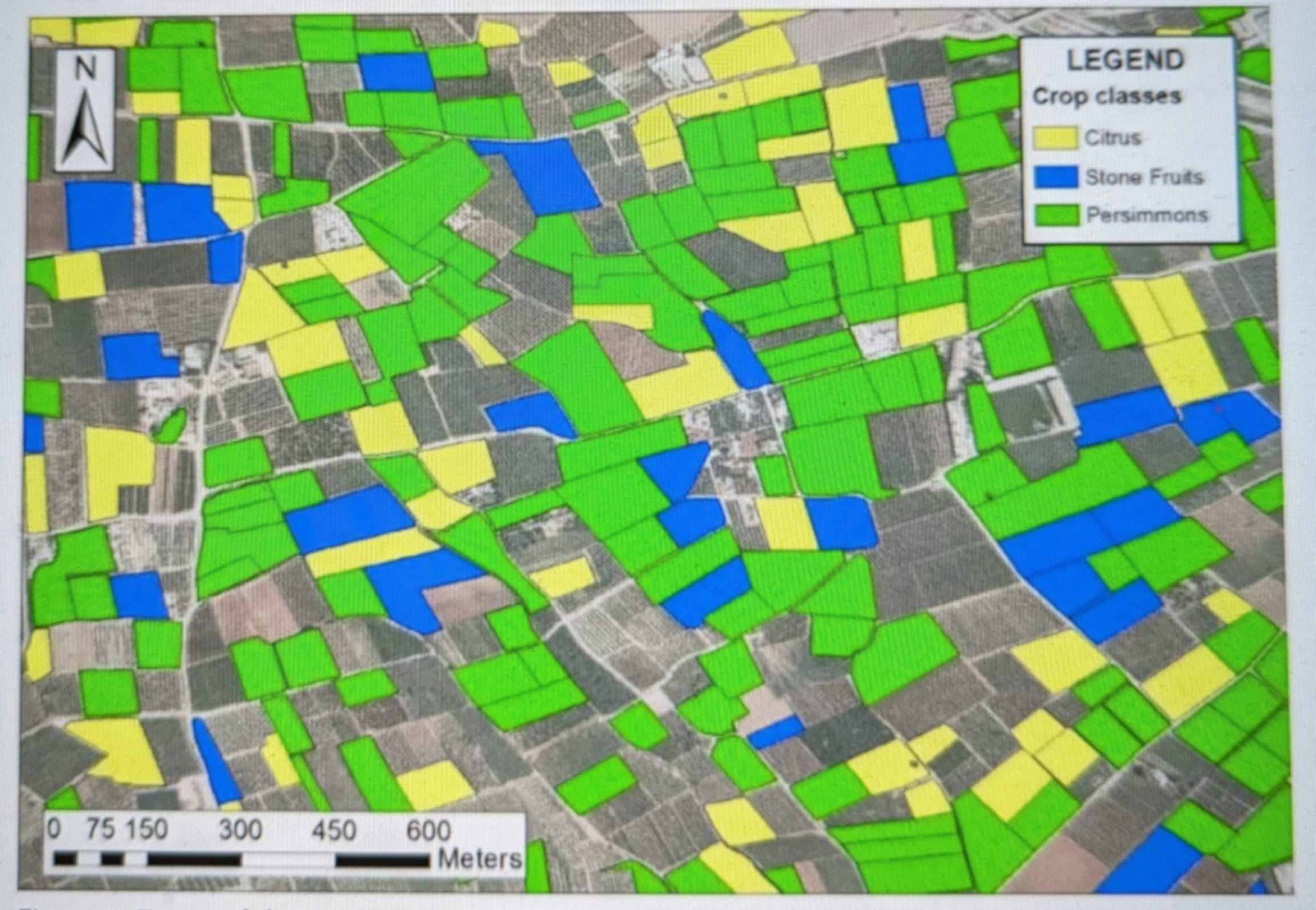
[Du côté d’ECPA…] Télédétection multitemporelle pour classifier les vergers.
juillet 5, 2023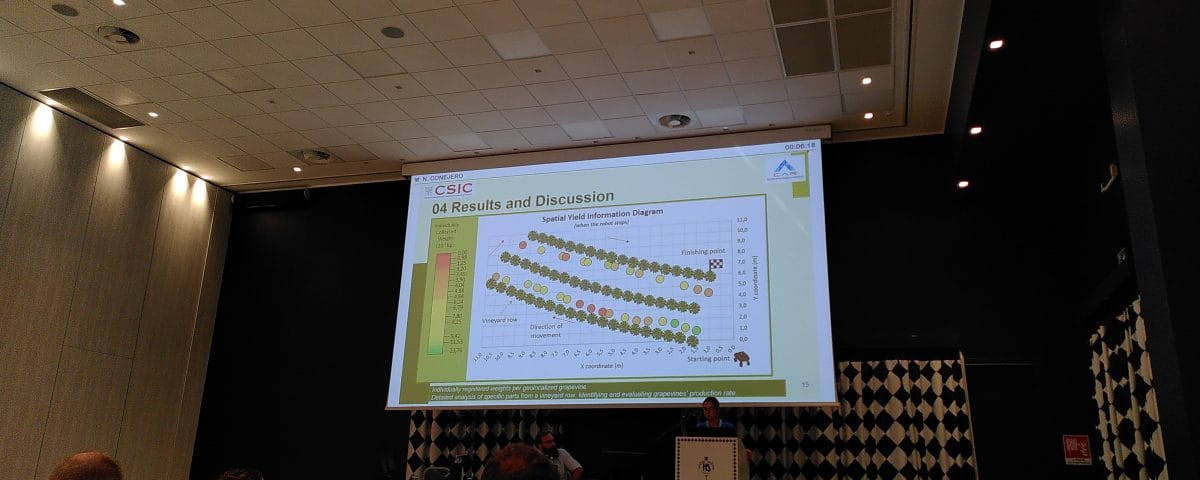
Le congrès ECPA (European Congress of Precision Agriculture) se tient à Bologne du 3 au 6 juillet. Réunissant plus de 400 chercheurs internationaux, ce congrès est une occasion pour l’équipe AgroTIC de présenter ses 11 travaux de recherches, et d’échanger avec la communauté internationale sur le futur de l’agriculture de précision.
Une équipe de chercheur.e.s du CSIC (Conseil supérieur de la recherche scientifique) en Espagne a mis en place une approche intéressante pour produire des cartes de rendement en vendange manuelle en partant de solution commerciales existante. Le dispositif repose sur l’association d’un robot suiveur et porteur de charge qui suit la personne qui vendange. Sur ce robot est monté une balance ainsi qu’une antenne GNSS RTK. Le robot suit l’opérateur jusqu’à ce qu’une masse maximale soit atteinte, puis il retourne en bout de rang. Ainsi en associant les données de pesée et de localisation, il devient possible de produire des cartes de rendements dans un processus de vendange non mécanisé.
Ce genre d’approche pourrait être diffusée rapidement car elle répond à un besoin plus important que la production de cartes de rendement. Il s’agit de la pénibilité du travail liée au port de charges lourdes et également à la difficulté de recruter du personnel saisonnier pour ce genre de tâches.
Ainsi le dispositif permettrait de répondre à une contrainte organisationnelle tout en apportant de la connaissance nécessaire à la prise de décision pour les itinéraires techniques.
Référence : Collaborative smart-robot for yield mapping and harvesting assistance, M.N. Conejero et al, Precision Agriculture ’23, 1067 – 1074



{kind=link}
{kind=link}